Otokar Simulation Tool by Using C#https://repo.valu3s.eu/use-cases/uc11-automated-robot-inspection-cell-for-quality-control-of-automotive-body-in-white/workflow/otokar-simulation-tool-by-using-chttps://repo.valu3s.eu/@@site-logo/logo_valu3s_green_transparent.png
Otokar Simulation Tool by Using C#
Creating a safety trajectory with Otokar's C# based simulation tool so that the robots do not experience any collisions in the system, and a 2D-2D comparison task is carried out in order to monitor the missing or incorrectly welded part of any part. In this way, the error and time factors are reduced.
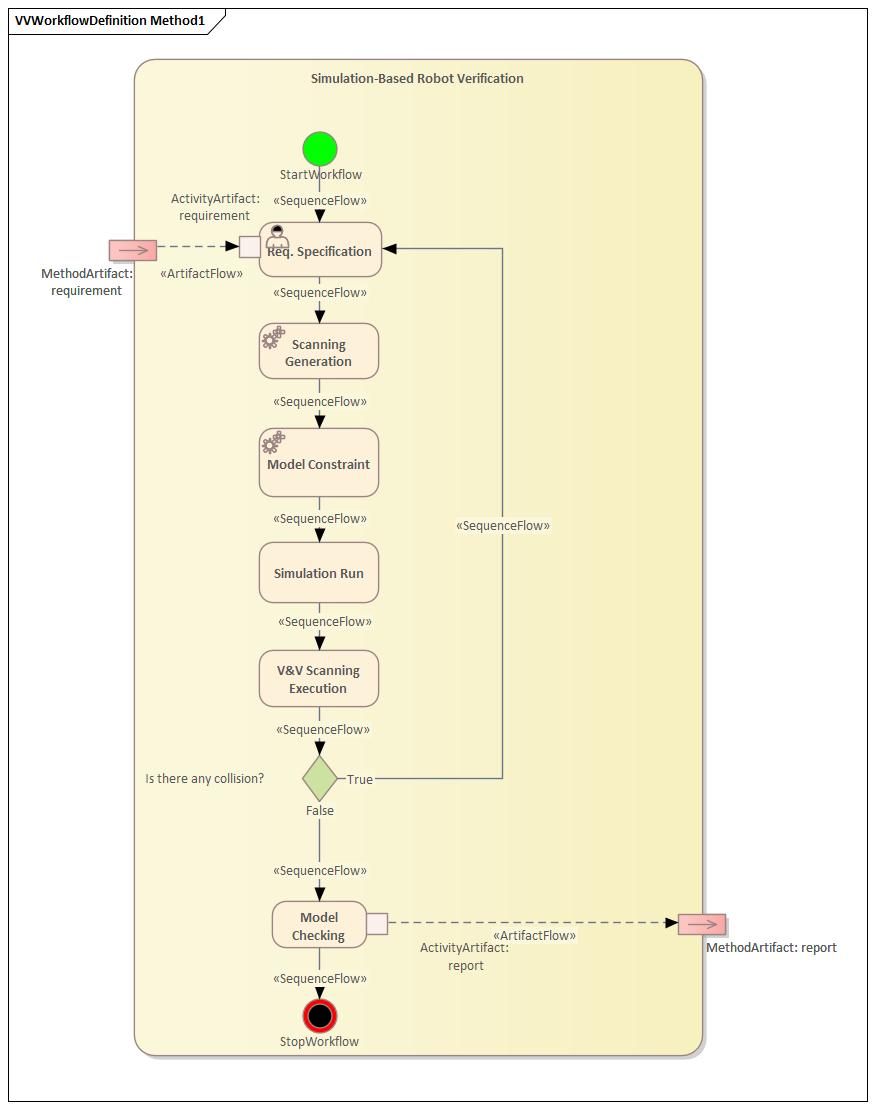
In the simulation-based testing process, the process workflow begins with the creation of the requirements specification (Specification). Then the scenarios are created with the help of the vehicle CAD data (Scanning Generation). There exists different body shapes and dimensions. In the next step (Model Constraint) a model with constraints is created from the data. The model is running in a simulation (Simulation Run) and V&V specifications are examined (V&V Scanning Execution). If collisions are detected, the entire process repeats with adapted requirements, otherwise reporting occurs and the workflow completes successfully.