V&V of machine learning-based systems using simulators
Machine learning is a critical enabling technology for many of the highly automated applications today. Typical examples include intelligent transport systems (ITS) where ML solutions are used to extract a digital representation of the traffic context from the highly dimensional sensor inputs. Unfortunately, the ML models are opaque in nature (stochastic and data driven with limited output interpretability), while functional safety requirements are strict and require a corresponding safety case. Furthermore, development of systems that rely on deep learning introduces new types of faults. To meet the increasing needs of trusted ML-based solutions, numerous V&V approaches have been proposed. Simulators can be used to support system testing as part of V&V of SCP requirements. An ideal simulator to test perception, planning and decision-making components of an autonomous system must realistically simulate the environment, sensors and their interaction with the environment through actuators. Simulated environments bring several benefits to V&V of ML-based systems, particularly when (i) data collection or data annotation is difficult, costly or time consuming, (ii) real-world testing is endangering human safety, (iii) coverage of collected data is limited, and (iv) Reproducible and scalability are important.
The major bulk of system-level testing of autonomous features in the automotive industry is carried out through on-road testing or using naturalistic field operational tests. These activities, however, are expensive, dangerous, and ineffective. A feasible and efficient alternative is to conduct system-level testing through computer simulations that can capture the entire self-driving vehicle and its operational environment using effective and high-fidelity physics-based simulators. There is a growing number of public-domain and commercial simulators that have been developed over the past few years to support realistic simulation of self-driving systems, e.g., TASS/Siemens PreScan, ESI Pro-SiVIC, CARLA, LGSVL, SUMO, AirSim, and BeamNG. Simulators will play an important role in the future of automotive V&V, as simulation is recognized as one of the main techniques in ISO/PAS 21448. As the possible input space when testing automotive systems is practically infinite, attempts to design test cases for comprehensive testing over the space of all possible simulation scenarios are futile. Hence, search-based software testing has been advocated as an effective and efficient strategy to generate test scenarios in simulators. Another line of research proposes techniques to generate test oracles, i.e., mechanisms for determining whether a test case has passed or failed. Related to the oracle problem, several authors proposed using metamorphic testing of ML-based perception systems, i.e., executing transformed test cases while expecting the same output. Such transformations are suitable to test in simulated environments, e.g., applying filters on camera input or modifying images using generative adversarial networks.
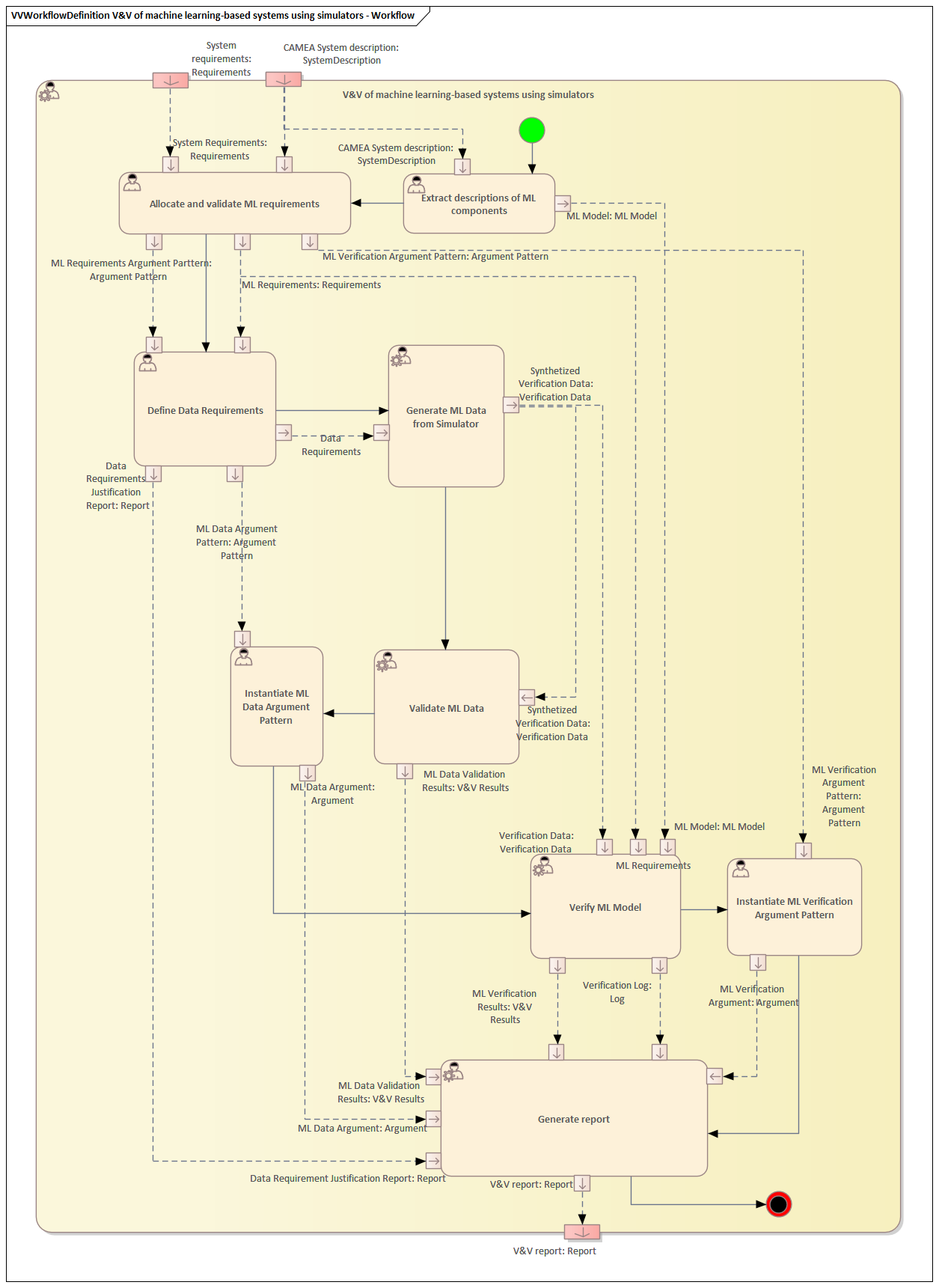
Inspired by AMLAS [1] process, the method "V&V of machine learning-based systems using simulators" is designed to work with ITS surveillance domain. The process starts with allocating the system requirements to ML-component requirements, and subsequently requirements for verification data. The Scenario Generator tool, realizing different algorithms (such as search-based testings) to generate test case scenarios that can later be imported into a realistic simulator (that can either be open source solutions or proprietary ones). The simulator will then synthetize sensor responses of these scenarios to build the verification data that fulfill the data requirements. The V&V results of the process consist of test cases results and instantiated arguments.
[1] Guidance on the Assurance of Machine Learning in Autonomous Systems (AMLAS)